|
Listen to this article
 |

Brooke Chalmers, who studies computer science, and Jason Kobrin, who studies mechanical engineering, work on the Mars Rover in the Richards Hall Makerspace. Credit: Matthew Modoono/Northeastern University
When the student leaders of the Northeastern University Mars Rover Team decided they were going to participate in the inaugural Winter Canadian International Rover Challenge, they thought it would be good practice more than anything else.
They didn’t expect to win the competition. Yet, that’s exactly what happened.
The Northeastern team took home the gold last month, beating McMaster University for the top spot with a score of 237.71 points to McMaster’s 137.13.
“It was pretty huge for us in terms of team morale,” said Brooke Chalmers, a third-year student at Northeastern and the integration lead and software co-lead for the Mars rover group. “It really felt like all the hours that we put in during the prior weeks paid off in a way.”
It’s the first competition win for the six-year-old club, which is composed of students studying computer science, engineering, and life science.
The university team of about 50 students had been hard at work developing and iterating on its latest robotic rover: the Watney, Mark V.
Coming in at 50 kg (110 lb.), the rover features a 5052 aluminum alloy chassis, six 3D-printed nylon wheels, a robotic arm with end-of-arm tooling (EOAT), a life-detection module for sample collection, and 14 onboard cameras.
The Canadian competition was broken up into four challenges designed to put students’ rovers through simulated environments similar to tasks a rover might have to complete while on Mars’ surface. Each challenge was ranked using a 100-point scale.
In the Arm Dexterity Challenge, for example, students were tasked with controlling the rover’s robotic arm to restore power to a campsite. The challenge involved navigating the robot through four control panels where the robotic arm had to press buttons and flip switches, explained Jason Kobrin, a fourth-year student at Northeastern and a mechanical operations co-lead for the Mars rover group.
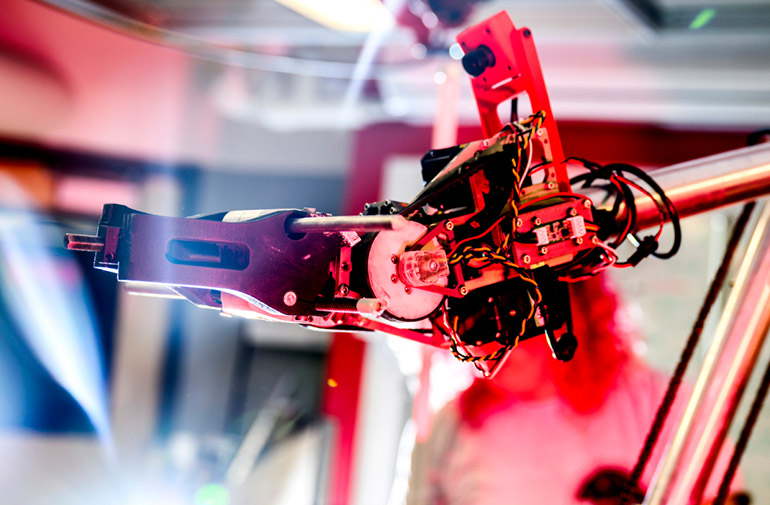
The robotic arm on the Northeastern team’s Mars Rover. Credit: Matthew Modoono/Northeastern University
Northeastern team redesigns robot arm for strength
Of the four teams taking part in the challenge, Northeastern scored the highest for the challenge, with a score of 49.49 points.
Kobrin said the team has spent the past year completing redesigning the robot’s arm, which used to be one of the rover’s weak points during previous competitions. It’s now one of the rover’s biggest strengths. The robot arm has six degrees of freedom and can carry loads up to about 10 kg (22 lb.).
“In order to improve that, we redesigned our arm this year to use better motors and to be easier to control overall,” he said.
It’s by taking part in these competitions and through regular testing where the team was able to narrow in on the rover’s shortcomings and improve its capabilities, Kobrin said. By working on the rover, students are also getting the opportunity to improve their own skills.
“Every week, it’s continuous improvement,” he noted. “Whether it’s adding a new portion of software code [or] whether designing a new mount for our cameras, every little improvement makes a huge difference.”
“For everybody to be able to design and build this robot to function well but also to be able to control it in high-pressure situations and to reach the goals we were seeking to reach, is just really impressive,” added Kobrin.
The team thought the two-day event hosted in Niagara Falls, Ontario, would be a great primer to test out the capabilities of the machine before the team took part in the upcoming annual University Rover Challenge (URC). The URC is the Mars Society’s premier Mars rover student competition held at the Mars Desert Research Center outside Hanksville, Utah.
The URC competition is old hat for the group, having participated in the challenge in 2019, 2022, and 2023. The competition was canceled in 2020 and 2021 because of the pandemic.
“We went into this competition thinking, ‘OK, we’re going to use this as an opportunity to prepare for URC. We’re going to test stuff to make sure it all works,’” Chalmers said.
The students will be competing at the University Rover Challenge this spring. Photos by Matthew Modoono/Northeastern University
Difficult terrain and team excitement
The team had its best showing during the Winter Transversal Challenge, with a finishing score of 84.72 points. For the challenge, the rover had to roll through treacherous and uneven terrain while avoiding obstacles.
“All the challenges involved some degree of the rover driving around and moving over difficult terrain, but this challenge was focused entirely on that,” said Chalmers.
With the overall win, Chalmers said she’s hopeful that new members will be excited to join.
“Most people on the team have been talking about this with their friends and family and talking about what we are doing, which is really cool,” she said. “I know a few of my friends have expressed interest in joining the team since. It’s very exciting to have something to talk about and have something to show for all the effort we put in.”

 About the author
About the author
Cesareo Contreras is a Northeastern Global News reporter and has covered robotics extensively. This article is reposted with permission.




Tell Us What You Think!