|
Listen to this article
 |

Tailwind provides visual navigation to drones in GPS-denied environments. Source: KEF Robotics
While autopilots have helped fly aircraft for nearly a century, recent improvements in computer vision and autonomy promise to bring more software-based capabilities onboard. KEF Robotics Inc. has been developing technologies to increase aircraft safety, reliability, and range.
Founded in 2018, KEF said it provides algorithms that use camera data to enable autonomous flight across a variety of platforms and use cases. The Pittsburgh-based company works with designers to integrate these autonomy features into their aircraft.
“Our company’s mantra is to provide visual autonomy capabilities with any camera, any drone, or any computer,” said Eric Amoroso, co-founder and chief technology officer of KEF Robotics. “Being flexible and deployable to drones changes the integration from days to hours, as well as providing safe, reliable navigation,” he told The Robot Report.
“Think of us as an alternative to GPS,” said Olga Pogoda, chief operating officer at KEF Robotics. “The situation in Ukraine shows the difficulty of operating without GPS and true autonomy on the aircraft.”
KEF Robotics enables aircraft to operate without signals
“We founded KEF while entering a Lockheed Martin competition, which whittled 200 teams down to nine,” recalled Amoroso. “The drones had to be autonomous, which was a perfect test case for modular, third-party software.”
Since then, KEF Robotics has worked with the Defense Threat Reduction Agency (DTRA), which uses drones with multiple sensors to search for weapons of mass destruction.
The company said its Tailwind visual navigation software can use stereo cameras for hazard detection and avoidance and that it uses machine learning to localize objects and complete missions. This is particularly important for defense and security missions.
“Our long-term goal is to allow an aircraft to complete complex missions with a button push,” said Pogoda. “An operator can provide an overhead image of a building and a general direction.”
“Then, the autonomous aircraft can take off, fly to a location, and conduct a search pattern,” she explained. “It can reroute based on hazards on the way, and then it can take pictures or readings and come back to an operator without transmitting any signals.”
KEF Robotics said Tailwind, which can work at night and long-range, GPS-denied flights, is in testing and on its way to availability. The software has been validated at speeds up to 100 mph and provides closed-loop autonomous operations with drift rates of 2% of the distance traveled. It has not yet been qualified for extreme weather or conditions such as dust, fog, or smoke.
Integration important for modular approach
As with other autonomous systems such as cars, a technology stack with layers of capabilities from different, specialized providers is evolving for aircraft and drones.
“We’re seeing an interesting economic trend in purchasing aircraft — manufacturers are focusing on producing aircraft, and autonomy software is complex,” Pogoda noted. “More companies just want to build the aircraft with open interfaces to allow their customers to add capabilities after the initial delivery.”
To facilitate a more rapid integration of advanced autonomy, the U.S. Department of Defense’s Modular Open Systems Approach (MOSA) is an initiative intended to save money, enable faster and easier equipment upgrades, and improve system interoperability. KEF Robotics is following this approach.
“MOSA says that everything should be open architecture, and the industry must create tools for everything to work together,” said Pogoda.
KEF Robotics has won Small Business Innovation Research (SBIR) grants to advance its technology. How does modular software figure in?
“The Defense Innovation Unit started pushing the MOSES philosophy that companies like KEF Robotics are embracing to rapidly integrate and innovate UAS [uncrewed aircraft system] technology,” Amoroso said. “We specialize in providing plug-and-play visual perception — technology that is expensive and challenging to develop if you’re also designing novel UAS. With MOSA, drone builders can let KEF Robotics focus on the reliability and performance challenges of visual perception while selling a product with state-of-the-art autonomy.”
“The conflict in Ukraine showed the crippling impacts of widespread GPS jamming and the utility of low-cost UAS,” he added. “It’s only through MOSA do we believe that we can circumvent these threats affordably and at scale.”
“KEF offers two forms of our solution,” said Amoroso. “One is for those interested in GPS-denied navigation, collision avoidance, and target localization. It’s a hardware-based payload that includes systems to communicate with an autopilot.”
“There’s also a software-only deployment for drones that may already have such hardware onboard,” he added. “We follow the MOSA philosophy for deploying our software, along with others’ software and camera drivers.”
For example, KEF Robotics’ software can take measurements and localize them, and a third-party architecture can do custom object detection to spot smokestacks, Amoroso said.
KEF Robotics collaborates with Auterion, Duality AI
“Before KEF came along, there was already a great community working on GPS-denied navigation, including Auterion and Cloud Ground Control,” said Amoroso. “But we had teams and companies coming to us saying, ‘How can we get vision navigation to be plug and play?'”
In June 2023, Auterion Government Solutions partnered with KEF Robotics to combine AuterionOS with Tailwind for robots and autonomous systems.
“We have a great relationship with Auterion, which sees the same core needs for ease of integration and reliability,” Amoroso said. “We offer an instantiation of vision-based navigation, but we want to set it up for new players to slot in and offer their solutions more easily, such as a lidar-based state estimator.”
“We started chatting early last year about how we’d work with Auterion Enterprise PX4,” he noted. “Auterion wanted to see a GPS-denied demonstration with its own UAVs, and within 18 hours, we got our system running with autopilot in a closed loop. We’re still doing demos with them and are interested in getting our software working with Auterion’s Skynode.”
In November, KEF Robotics said it was working with Duality AI’s Falcon digital-twin integration program to develop autonomy software for a tethered uncrewed aircraft system (TeUAS) under a U.S. Army SBIR contract. Falcon can simulate different environments and drone configurations.
“It can simulate challenging scenarios like cluttered forests to test our software and drones,” said Amoroso. “This is similar to how simulation can help autonomous vehicles augment safety, with the benefit of being able to deploy different camera configurations and software.”
Why decoupling software and hardware makes sense
How does KEF divide tasks between its systems and those of its partners? “The industry has already aggregated around some standards, but there are always customizations involved to meet a customer’s needs,” replied Amoroso.
“Some customers will say it’s OK to plug in our navigational messaging, and others prefer a companion computer that can monitor measurements or guidance commands to verify or support their own planning,” he said. “It’s important to be flexible and to understand early on what are the interfaces and to do drone demos to show that we can still execute a mission even if we don’t have full control of position or velocity.”
“But the advantage is, by decoupling autonomy from specific hardware, we can generalize our approach and rapidly integrate on a new platform,” Amoroso said. “If an aircraft has an open design, we can integrate our complex software in less than a day, start flying, and then progress to a tighter integration at a customer’s request.”
KEF Robotics is currently focused on defense applications, with a multi-aircraft demonstration of Tailwind for the Army planned for September 2024.
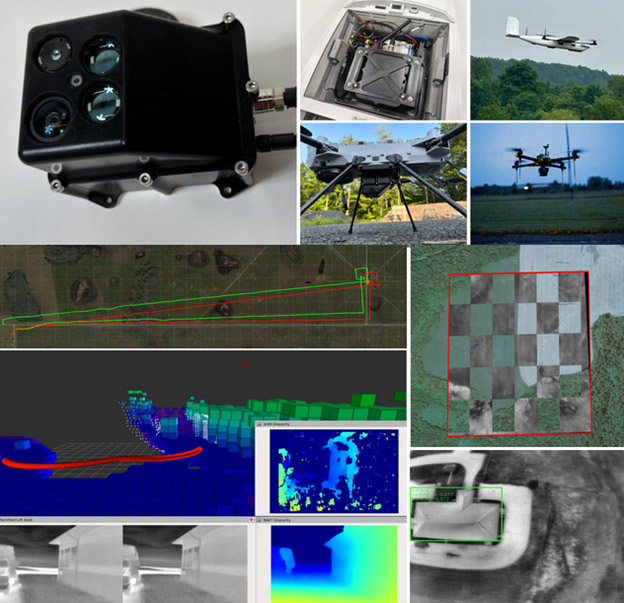
KEF has designed its autonomy software to be hardware-agnostic. Source: KEF Robotics




Tell Us What You Think!